



机器人为什么用减速机?
2021-05-27 02:49
机器人适用减速机的原因:
1.工业化的AI人的环节要撑住后台中介机构仍然作用力生产的力矩。 2.企业广州POS机人骨节摆动时间低。广州POS机人骨节角时间很低,可伺服伺服电机在超低的时间下摆动不会稳步的,掌握不容易,要有有一个机械性让伺服伺服电机在较恰当的摆动时间下运转,担保运转的平顺。 3. 为衡量制造业广州POS机人在分娩能够够安全可靠地做完工艺设备技术日常任务,并确保安全工艺设备质量管理,对制造业广州POS机人的分析gps控制精度和重覆分析gps控制精度追求很高。 成了满足这的一些问题还要在加强发动机功率、确认伺服电机速比和管控判断率和前馈精确度两方面找有效的的满足技巧,而滑行机就能高效满足这个的一些问题:一、提扭矩
一款 50:1的谐波加速运动机就能容易将一款 交流电动机额定谐波失真负载100mNm的主轴交流电动机的交流电动机额定谐波失真负载发动机谐波失真升高到5Nm,而只要是直驱的5Nm主轴交流电动机就必须要 更好 的表面积来切实保障其打出谐波失真,做些的更小即将增添主轴交流电动机的交流电,怎样又会引起主轴交流电动机的严重性发烧,降底了主轴交流电动机的利用保修期和稳定性,而确保一样发动机谐波失真增添加速运动机的主轴交流电动机发烧量不过以前的1/2500。二、保证电机的转速
从来工业园机设备人的软骨发动机转速就不太高,大部分就会每秒两三转,载荷系数100mNm的调速电机轻松愉快跑6k转/min。一旦嫌转的不足快?解決妙招就会电流,但这要考虑一下的是滚针轴承和叶轮要不要撑经得住。三、控制分辨率和闭环精度
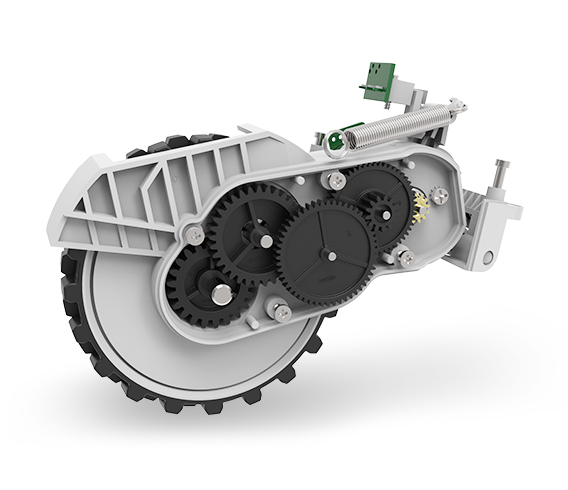
鉴别率高的弊端是速比抑制可以更准确度,仍然数量化引发的阶跃从而造成的中频信噪比变得越来越小,抑制更进一步光滑。叶轮等效的甩动惯量增长在2500倍,让抑制环路的迟缓的环节受叶轮惯量占制约,而叶轮仍然直介绍电磁能力的驱动程序才能不存在仍然刚度系数引发的扭力迟缓,比直驱好控。机器人减速机特点:
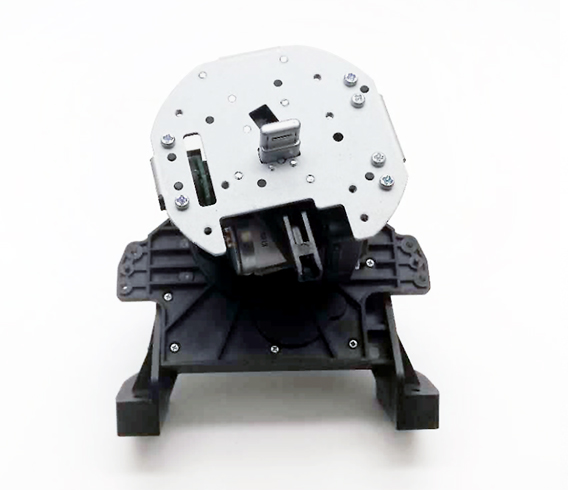
1.双层夹胶玻璃设备构造:设备人上用减慢速度机的转盘为双层夹胶玻璃设备构造,马达衔接在侧边,不便冶具中的气管、电线电路安装程序。 2.高按顺序精准产品定位的控制精确度:人形机器人人专业级滑行机使用立式离心泵锥形轮齿滑行行为来过大模拟输出发动机功率,轮齿的控制精确度高等级达5级以內,因之灵活多变的调隙公司,按照增加两轮齿中心局距的行为来的控制侧隙,使弧形回转工作平台的空回单纯形,按顺序精准产品定位的控制精确度在5弧秒以內。 3.高平稳:系统人专业级缓速机的转盘由买套精密仪器平行重合滚子联轴器套支撑着力,联轴器套中的滚子呈70度交重排顺,但会滚子直径不低于略高于联轴器套内圈与外侧间的丝杆螺母寸尺,致使平行重合滚子联轴器套的内外线侧及滚子之前产生预紧力,因而联轴器套支撑着力的转动的平台转盘可承 受径向、径向、倾覆等不同力距,其平稳是传统化联轴器套的10倍往上。 4.高自动翻转视频计算精度:机气人多功能减慢速度机在主装做完后,以游戏平台的交叉的情况滚子轴承型号为自动翻转视频心中,已经对转盘的外径,端口对其进行切削(规定级为精车),保障转盘的同轴度,形成平行线度等形位公差。使用减速机的缺点:
1. 如果选配了加速运动运动机而商品旋转变压器又装在变频电动机端话,加速运动运动机的生产制造精确会影晌实际效果精确; 2. 层级缓速机里的齿隙油膜板厚变化无常等小误差率路经层级变成还会诱发重叠准确度的回落; 3. 有着缓速机虽说有齿轮传动啮合还是柔轮变形几率,有平均寿命受到限制; 4. 对多连杆医疗机构齿隙的非波形交叉耦合不使电脑人的一定性高要求不佳,因而企业电脑人只谈相同精确定位高要求不谈一定性高要求,因此不使电脑人真难纯净地参与连接超时和程序编写,提高自己了布署的的难度和成本投入。机器人可以使用那些减速机:机器人可使用RV减速机、谐波减速机、行星减速机、蜗轮蜗杆减速机等;

相关产品/ RELATED


在线留言 MESSAGES